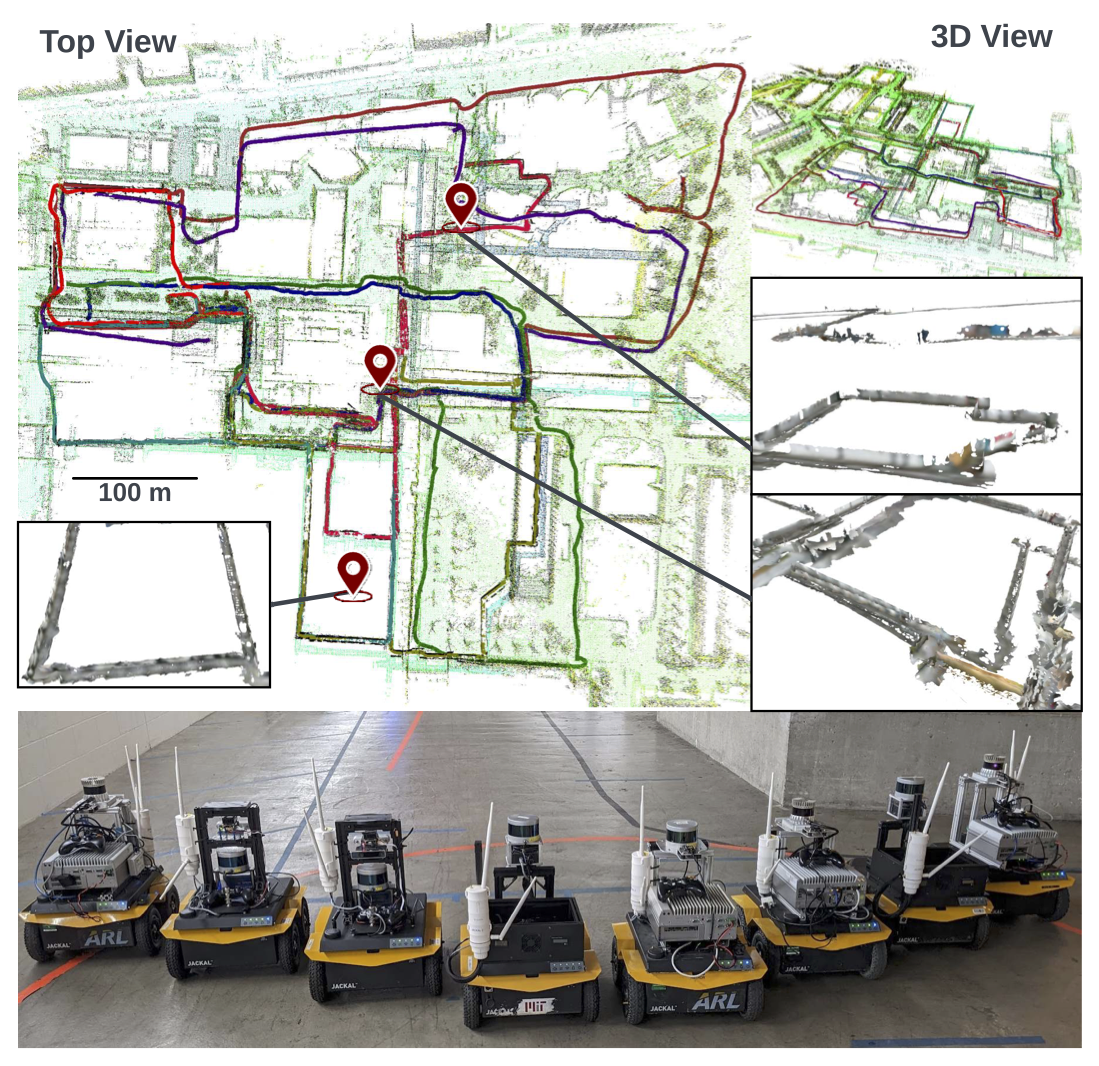
The paper (Tian et al., 2022) presents the first approach for distributed multi-robot dense metric-semantic mapping. In particular, we present Kimera-Multi, a multi-robot system that (i) is robust to spurious loop closures resulting from incorrect place recognition, (ii) is fully distributed and only relies on local communication, and (iii) builds a globally consistent metric-semantic 3D mesh model of the environment in real-time, where faces of the mesh are annotated with semantic labels. Kimera-Multi has been demonstrated in real-tests involving up to 3 robots and trajectories up to 800m, while more recently we have used the system in tests with up to 8 robots and trajectories up to 8km, see (Tian et al., 2023).
The code has been released open-source at: https://github.com/MIT-SPARK/Kimera-Multi.
The paper has been recognized with the IEEE Transactions on Robotics (T-RO) King-Sun Fu Memorial Best Paper Award as the best T-RO paper published in 2022, and has been featured in the IEEE Spectrum article MIT Multirobot Mapping Sets New “Gold Standard”.
References
- Tian, Y., Chang, Y., Quang, L., Schang, A., Nieto-Granda, C., How, J. P., & Carlone, L. (2023). Resilient and Distributed Multi-Robot Visual SLAM: Datasets, Experiments, and Lessons Learned. IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS).
- Tian, Y., Chang, Y., Arias, F. H., Nieto-Granda, C., How, J. P., & Carlone, L. (2022). Kimera-Multi: Robust, Distributed, Dense Metric-Semantic SLAM for Multi-Robot Systems. IEEE Trans. Robotics.